
I was a research intern at CLVR lab at KAIST for a year advised by Prof. Joseph Lim working on various topics in robot learning. I graduated from IIT Bombay with a major in Aerospace Engineering (honour student) and a minor in AI. During my undergrad, I was advised by Prof. Xianyuan Zhan and Prof. Biplab Banerjee at IIT Bombay and worked on algorithms for offline reinforcement learning.
I also led a student team that worked on autonomous drones 🕹️🚁!
(memories with the team)
My goal is to develop robots 🤖 with human-like intelligence which includes embodying them with congnitive capabilities for understanding reality 🧠 and physical interlligence to influence it 🦾. Specifically i am interested in:
- Learning robust sensorimotor skills (dexterous manipulation ,whole-body control, visuotactile manipulation)
- Adapting learned skills to new environments (rapid adaptation, continual learning)
- Composing skills for more complex tasks (skill-chaining, energy-based models)

Research Intern
KAIST AI
2023-Current

Research Intern (Remote)
Tsinghua University
2022-2023

Intern (Remote)
Daikin RnD Japan
Summer 2022

BTech, AE
IIT Bombay
2019 - 2023
Publications
 When to Trust Your Simulator: Dynamics-Aware Hybrid Offline-and-Online Reinforcement Learning
When to Trust Your Simulator: Dynamics-Aware Hybrid Offline-and-Online Reinforcement Learning
Haoyi Niu,Shubham Sharma,Yiwen Qiu,Ming Li,Guyue Zhou,Jianming Hu, Xianyuan Zhan
NeurIPS 2022 (Spotlight)
Paper •
Code •
Video
 A Novel Approach to Autonomous Aerial
Manipulation using Multiple Drones
A Novel Approach to Autonomous Aerial
Manipulation using Multiple Drones
Team Aerove, UMIC
IARC 2021 Symposium on Autonomous aerial flight
Design Report
Projects
 Automating unstructured welding
Automating unstructured welding
Shubham Sharma, Junseung Lee
Worked on motion planning soltuions for automating precision welding using a RB3 arm and depth data
 Muscle memory: retreival augumented RL for dexterous manipulation
Muscle memory: retreival augumented RL for dexterous manipulation
Minho Heo, Shubham Sharma
We try to speed up RL in high-dimentional control problems via retreival of action synergies
Report •
Slides
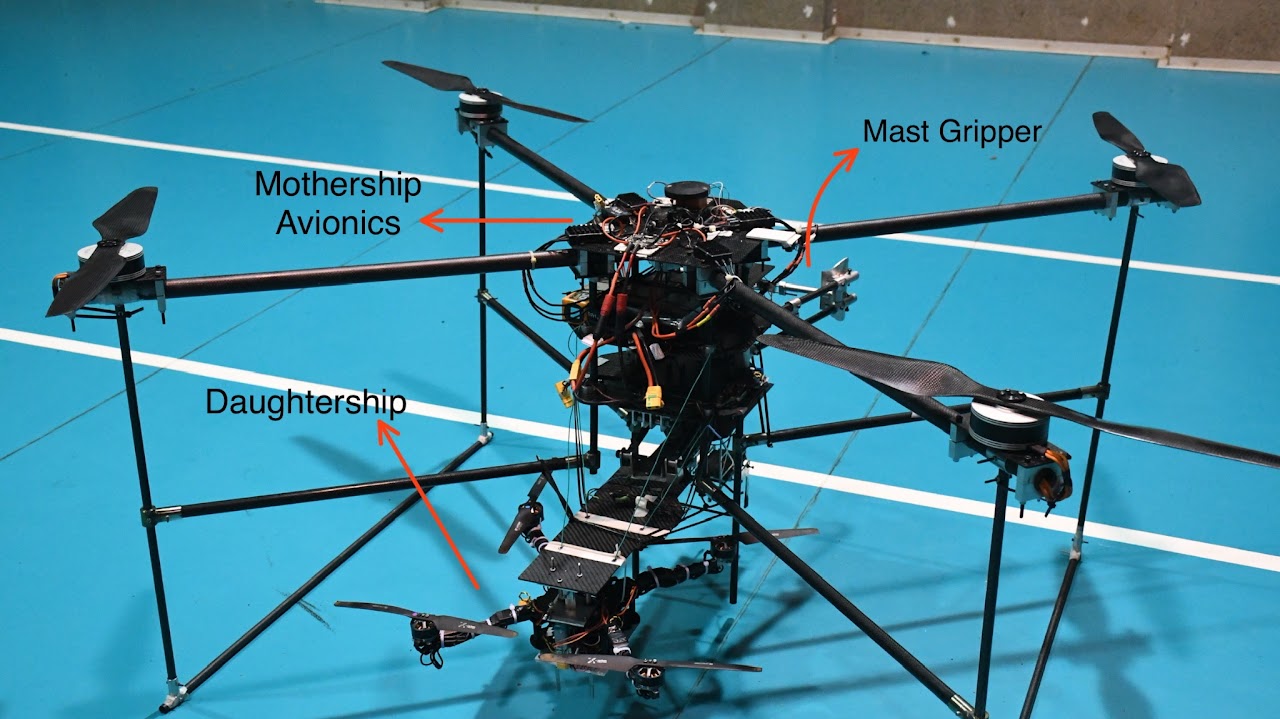 International Aerial Robotics Challenge (Mission 9)
International Aerial Robotics Challenge (Mission 9)
Innovation Cell IITB
Led a team of 20+ undergrads in the making of a mother-daughter drone system to attempt performing a precise insertion task mid-air
Blog with videos